Mayank Bansal
AI Leader - CV, ML & Robotics
Applying foundational multimodal GenAI advances to build transformational AWS products
Amazon Web Services (AWS) Agentic AI Research
Biography
Mayank Bansal, PhD, is a Principal Applied Scientist in the Agentic AI Org within Amazon (AWS) where he is leading AGI initiatives in Computer Vision space using LLMs and multimodal VLMs. Before this, he incubated framework and product vision (with Dr. Greg Hager) for video-centric problem solving by combining Large Language Models (LLMs) with Large Vision and Vision-Language Foundation Models (VLMs), and utilizing multimodal AGI in a continual learning loop. He has also solved problems in generalized, composable multi-camera person identity tracking e.g. disjoint multi-camera Deep-ReID under edge-compute constraints, single- and multi-camera localization etc. and established the framework (with Dr. Gerard Medioni) and led the development for streaming end-to-end learning [patent granted] for next generation “Just Walk Out” technology stack as part of the AWS Just-Walk-Out (JWO)/Amazon Go Research org.
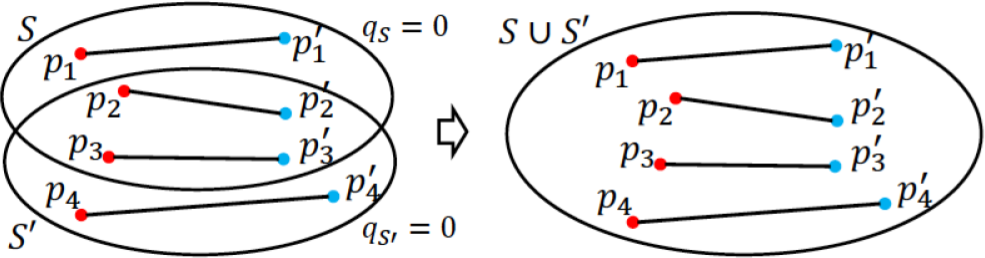
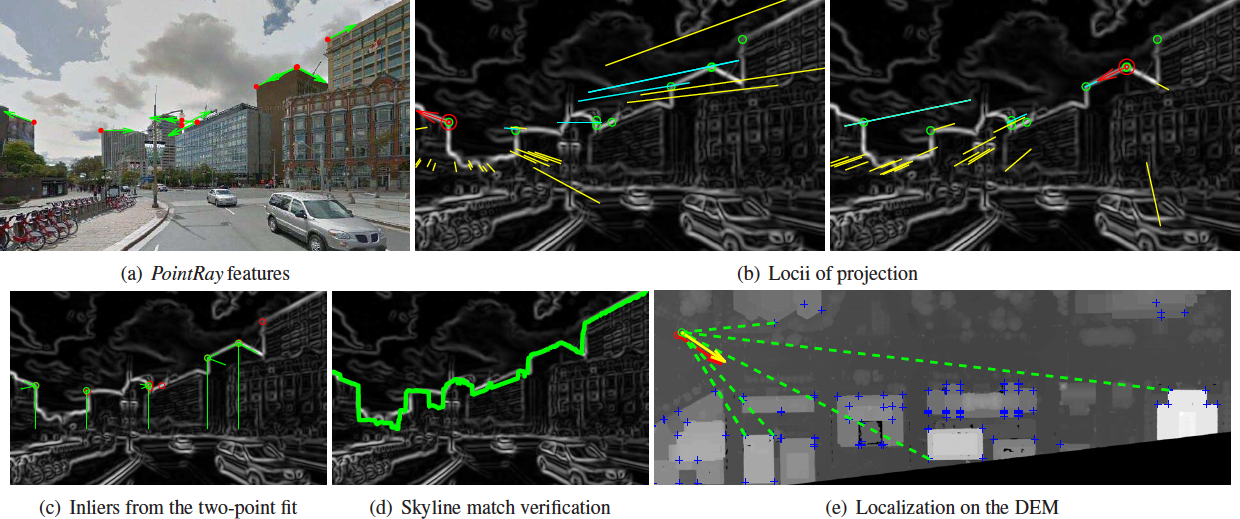
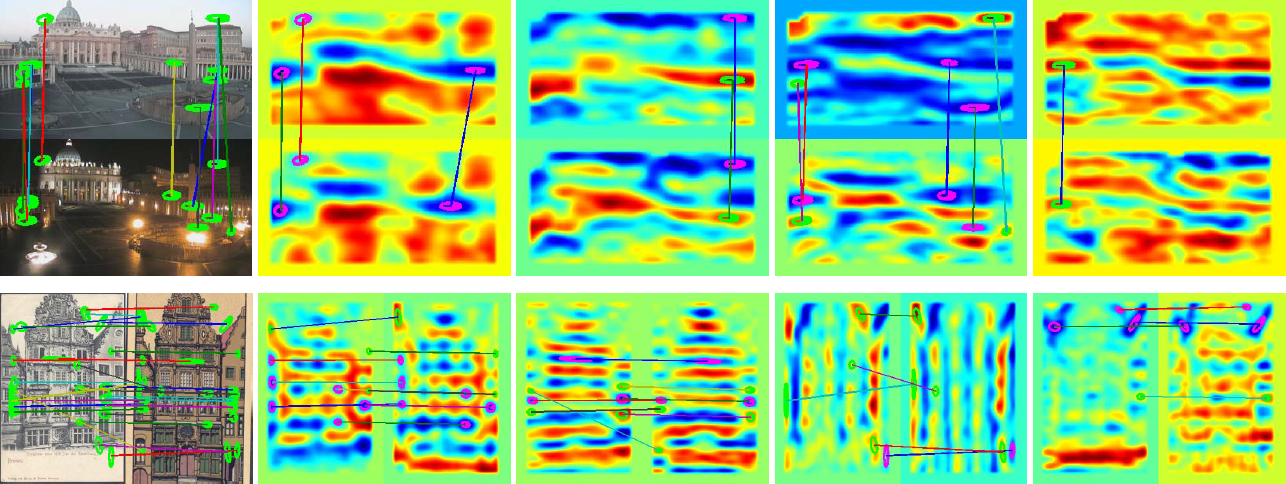
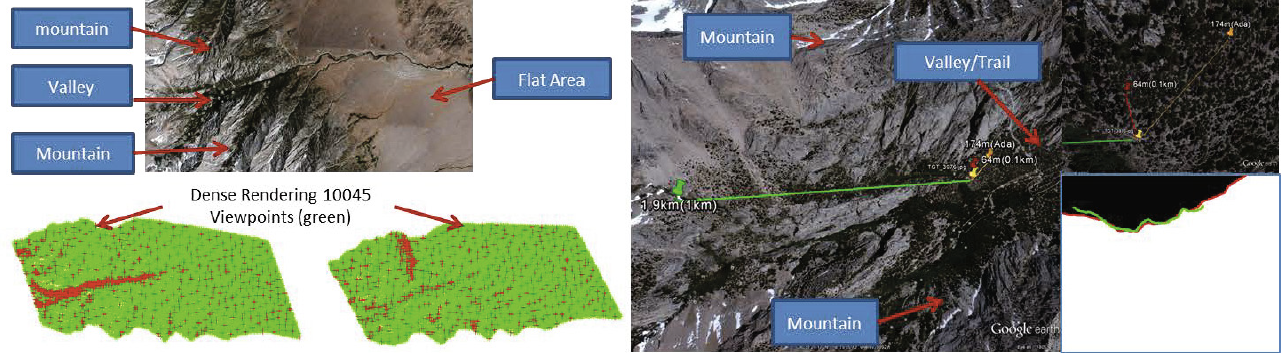
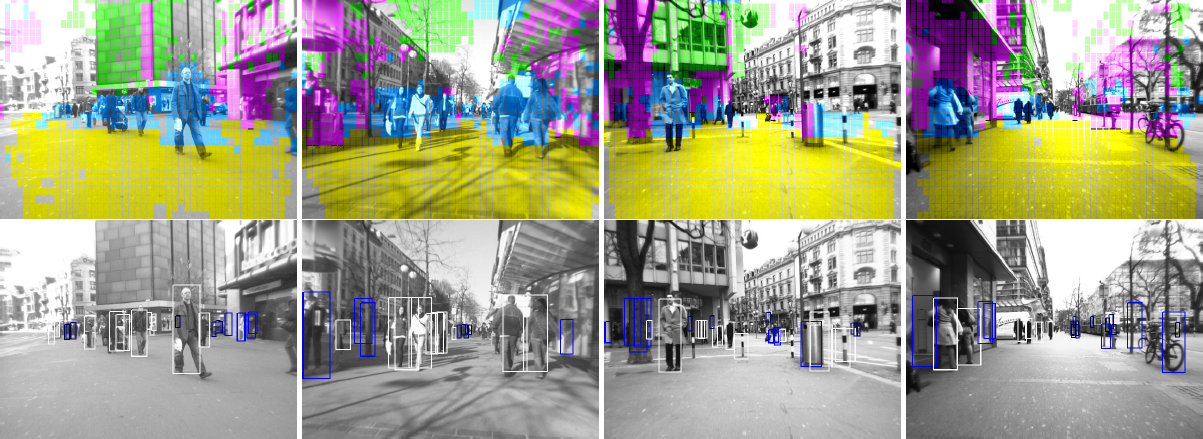
Prior to Amazon, he was a Staff Research Scientist at Waymo – formerly the Google Self-Driving Car Project. In this role, he led efforts on end-to-end deep-learning techniques for planning and prediction. Before that, he focused on the perception stack, solving problems like detection, tracking and localization of emergency vehicles, and detection of turn-signals, hazard lights and various other signals on other vehicles in the scene. Prior to Waymo, he was a Principal Research Scientist at the Center for Vision Technologies, SRI International where he led several computer vision and robotics research and developement (R&D) programs for a range of government (DARPA, NGA, FHWA, NIH etc.) and commercial (Google Inc., Autoliv Inc.) clients. In parallel with this full-time role, he pursued a full-time PhD in Computer Vision from the University of Pennsylvania from 2010-2014 and developed novel techniques for matching disparate views of a given 3D scene.
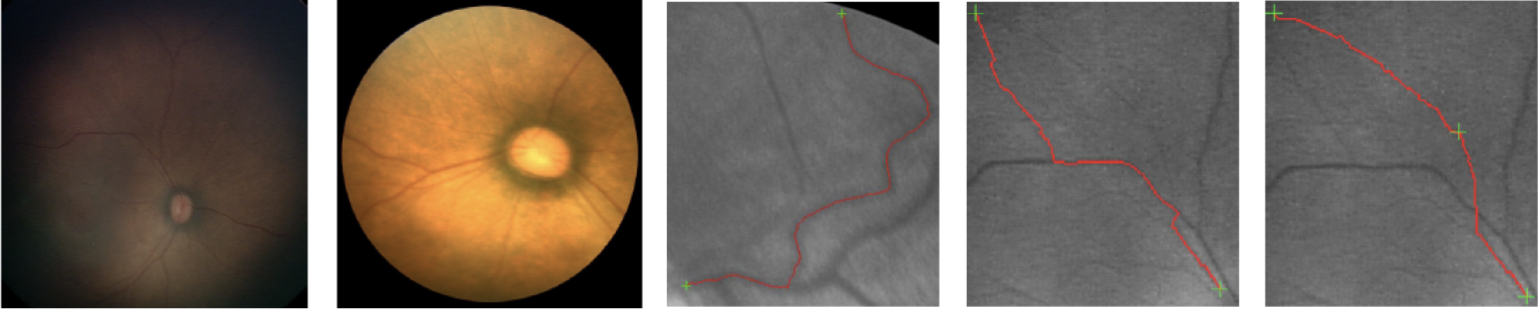
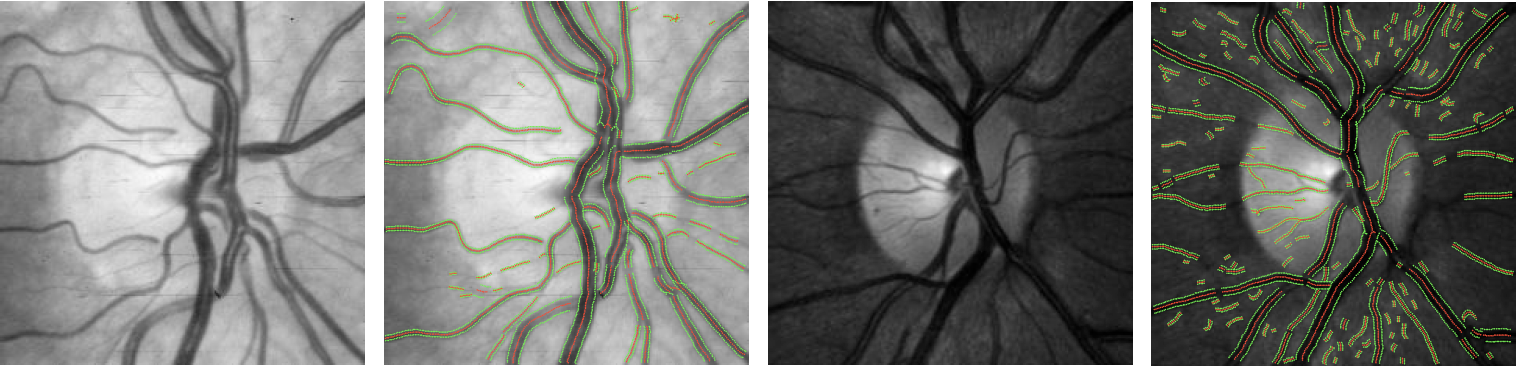
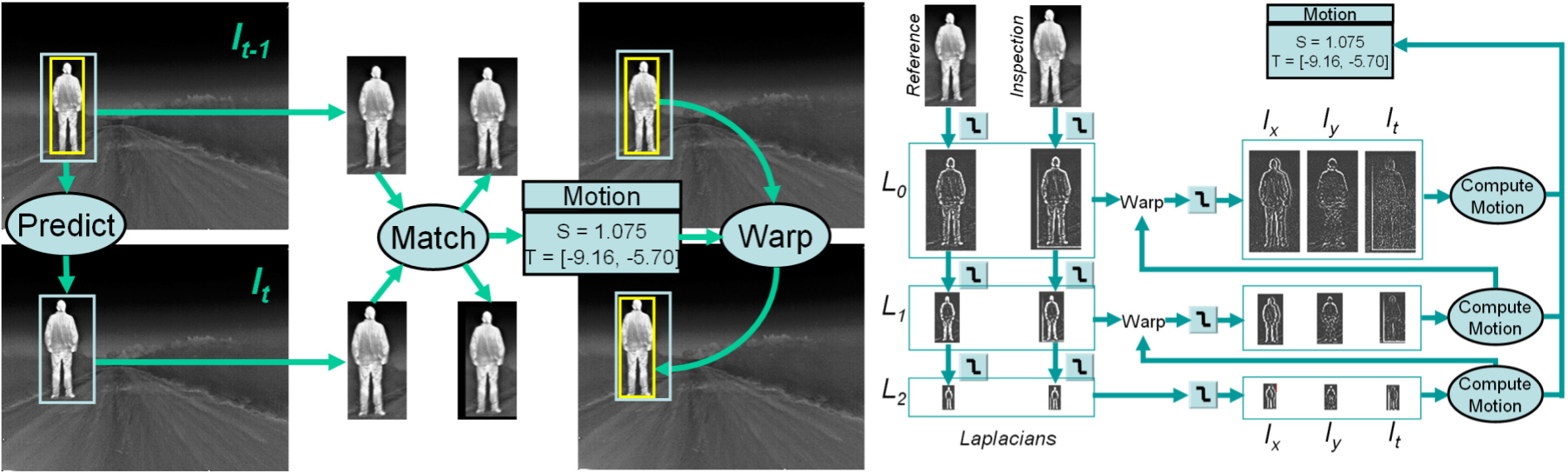
Bansal has more than 21 years of experience in 3D/2D object detection and recognition from LiDAR and EO/IR mono/stereo camera data as well as deep-learning modeling and research experience for a variety of computer vision and robotics applications. He has significant expertise in geometric and stereo vision, perception for mobile robotics, medical image analysis and geo-localization techniques from a variety of input sources.
Bansal is a Senior Member of the IEEE and the IEEE Computer Society. He has published close to 40 papers in peer-reviewed conferences and journals and holds thirteen patents.
Bansal received his PhD in Computer & Information Sciences from the University of Pennsylvania. His Masters and Bachelors degrees in Computer Science & Engineering are from the Indian Institute of Technology (IIT) Delhi, New Delhi, India where he was awarded the Institute Silver Medal for obtaining the 1st rank in the department of Computer Science.
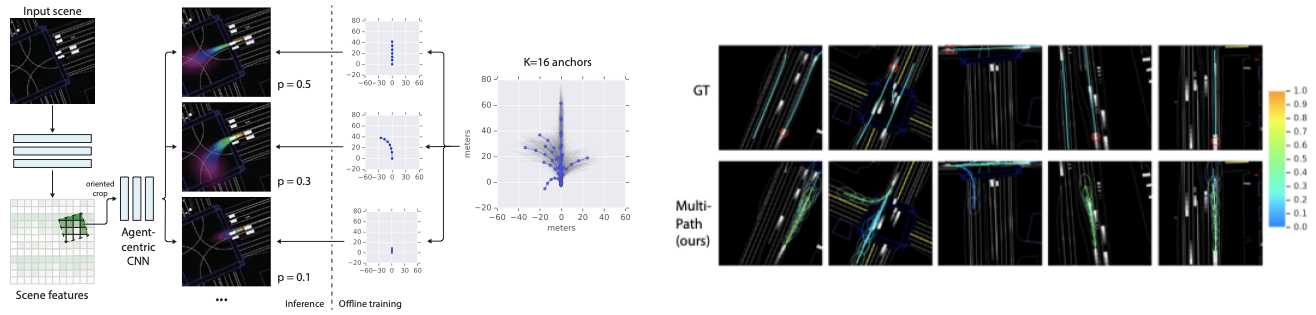
Learning to Drive: Beyond Pure Imitation
By Mayank Bansal and Abhijit Ogale – Waymo Research. At Waymo, we are focused on building the world’s most experienced driver. And just like any good driver, our vehicle needs to perceive and understand the world around it by recognizing surrounding objects and predicting what they might do next, before deciding how to drive safely while obeying the traffic rules.