Pedestrian Association and Localization in Monocular FIR Video Sequence
Abstract
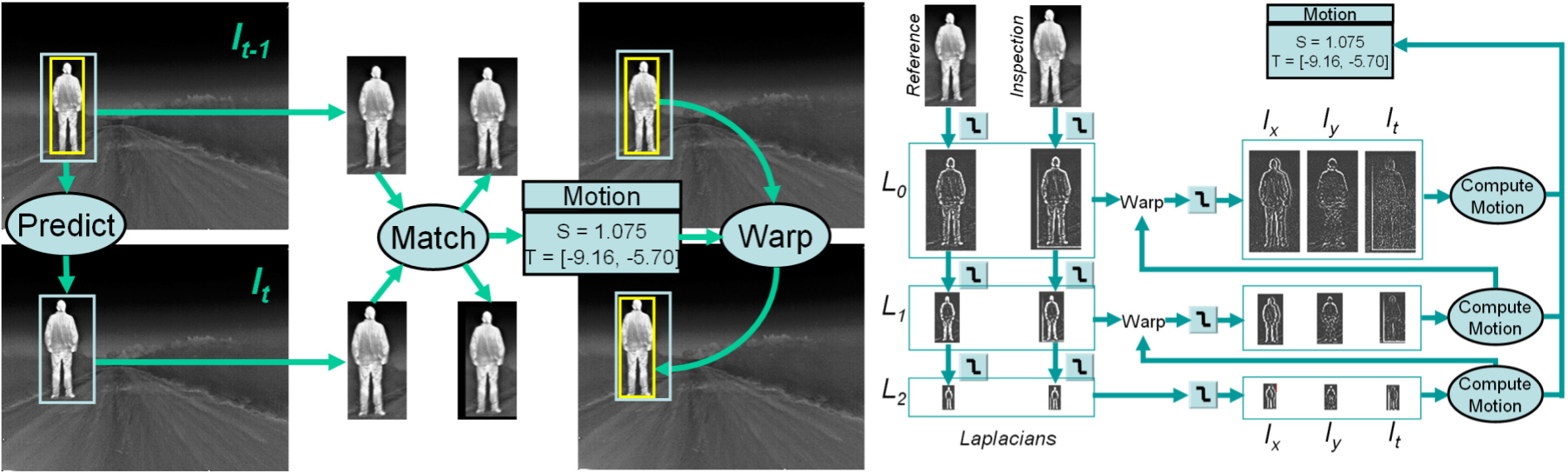
This paper addresses the frame-to-frame data associ- ation and state estimation problems in localization of a pedestrian relative to a moving vehicle from a monocular far infra-red video sequence. Using a novel application of the hierarchical model-based motion estimation frame- work, we are able to use the image appearance informa- tion to solve the frame-to-frame data association problem and estimate a sub-pixel accurate height ratio for a pedes- trian in two frames. Then, to localize the pedestrian, we propose a novel approach of using the pedestrian height ratio estimates to guide an interacting multiple-hypothesis- mode/height filtering algorithm instead of using a constant pedestrian height model. Experiments on several IR se- quences demonstrate that this approach achieves results comparable to those from a known pedestrian height thus avoiding errors from a constant height model based ap- proach.