Geometric Urban Geo-localization
Abstract
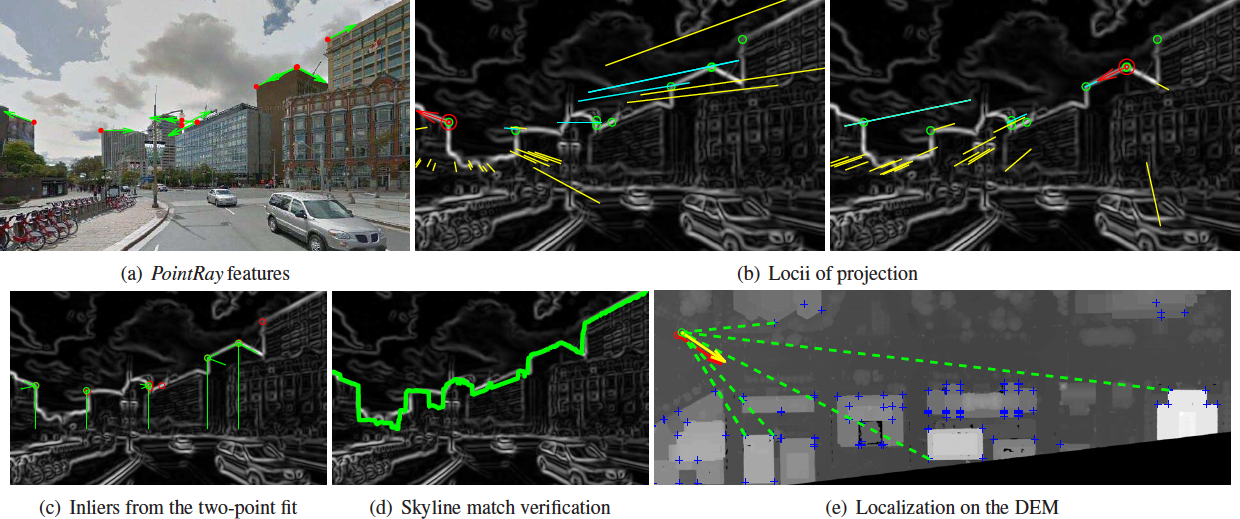
We propose a purely geometric correspondence-free approach to urban geo-localization using 3D point-ray features extracted from the Digital Elevation Map of an urban environment. We derive a novel formulation for estimating the camera pose locus using 3D-to-2D correspondence of a single point and a single direction alone. We show how this allows us to compute putative correspondences between building corners in the DEM and the query image by exhaustively combining pairs of point-ray features. Then, we employ the two-point method to estimate both the camera pose and compute correspondences between buildings in the DEM and the query image. Finally, we show that the computed camera poses can be efficiently ranked by a simple skyline projection step using building edges from the DEM. Our experimental evaluation illustrates the promise of a purely geometric approach to the urban geolocalization problem.